Konstrukcja Linefollower’a
Celem projektu było opracowanie robota podążającego za linią. Na budowę robota składają się dwie płytki PCB. Płytka stanowiąca podwozie oraz listwa
Read MoreCelem projektu było opracowanie robota podążającego za linią. Na budowę robota składają się dwie płytki PCB. Płytka stanowiąca podwozie oraz listwa
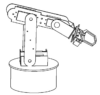
Read MoreProjekt wykonany w ramach zajęć z przedmiotu Sterowniki Urządzeń Mechatronicznych. Marcin BIAŁEK Patryk NOWAK Prowadzący: mgr inż. Roman REGULSKI MANIPULATOR
Read MoreW sobotę odbyły się pierwsze zawody tego sezonu – ROBOCOMP w krakowskiej AGH. Nasze koło naukowe zaprezentowało się najlepiej jak
Read Moremgr inż. Bartosz MINOROWICZ Badania zastosowania stopu z magnetyczną pamięcią kształtu w przetworniku pozycjonującym Research on application of magnetic shape
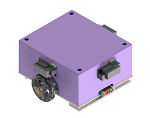
Read MoreWYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Konstrukcja autonomicznego robota mobilnego Autor: Marcin Maćkowiak Promotor: prof. dr hab. inż. Andrzej Milecki Cele
Read MoreWYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA POLITECHNIKA POZNAŃSKA PRACA DYPLOMOWA INŻYNIERSKA Konstrukcja i sterowanie dwuosiowej platformy stabilizującej Tymoteusz LINDNER Promotor:
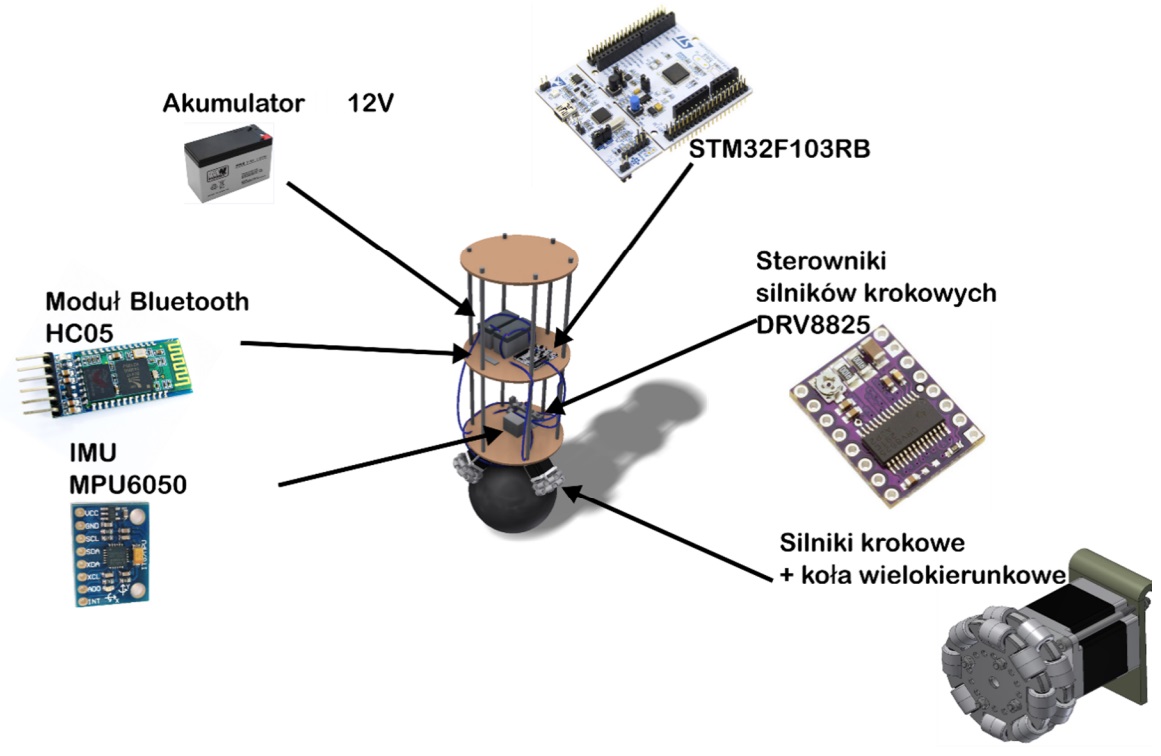
Read MoreWYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA POLITECHNIKA POZNAŃSKA PRACA DYPLOMOWA INŻYNIERSKA Konstrukcja i sterowanie holonomicznego robota balansującego na sferycznym kole Daniel
Read MorePROJEKT ROBOTA MOBILNEGO ZBIERAJĄCEGO INFORMACJE O POMIESZCZENIU PRACA MAGISTERSKA Maciej Ciechanowski Promotor: dr inż. Dariusz Sędziak W dzisiejszych czasach coraz
Read MoreZapraszamy do zapisu i udziału w studium podyplomowym – Sterowniki PLC w Urządzeniach Mechatronicznych Do dyspozycji Słuchaczy studiów są sale dydaktyczno-laboratoryjne Wydziału
Read MoreW piątek (06.11.2015) na zawodach organizowanych przez Studenckie Koło Naukowe SEP na Politechnice Gdańskiej studenci działający w ramach KN MECHATRON
Read More