Projekt badawczy własny nr: N N502 260737, zatytułowany:
Zastosowanie metod sztucznej inteligencji do nadzorowania pracy urządzeń mechatronicznych z napędami elektrohydraulicznymi sterowanymi bezprzewodowo
Głównym celem projektu było opracowanie metod, technik i konkretnych urządzeń przeznaczonych do sterowania napędami elektrohydraulicznymi oraz wybranymi urządzeniami, w których zastosowano te napędy. Prace były skoncentrowane na sterowaniu za pośrednictwem dżojstików z siłowym sprzężeniem zwrotnym, przy wykorzystywaniu łączności bezprzewodowej oraz przy ograniczonej widoczności. Badania prowadzono z wykorzystaniem technik wirtualnych.
W pierwszym etapie opracowano modele symulacyjne kilkunastu różnych serwonapędów elektrohydraulicznych uwzględniając w nich najważniejsze nieliniowości. Wykonano również modele symulacyjne dżojstików z tzw. siłowym sprzężeniem zwrotnym. Modele te, a szczególnie ich parametry zostały zweryfikowane w trakcie badań doświadczalnych. W ramach projektu zbudowano stanowisko laboratoryjne oraz opracowano programy do badań identyfikacyjnych dżojstików. W następnym kroku połączono modele serwonapędu oraz dżojstika i wykonano badania symulacyjne całego zestawu, które pokazały najważniejsze właściwości i możliwości sterowania napędem elektrohydraulicznym przez operatora wykorzystującego dżojstik z siłowym sprzężeniem zwrotnym. Wykonano również pierwsze modele systemu sterowania bezprzewodowego. Badano wpływ opóźnienia transmisji na jakość sterowania serwonapędem za pośrednictwem dżojstika.
Wykonano również modele symulacyjne dżojstików z tzw. siłowym sprzężeniem zwrotnym. Modele te, a szczególnie ich parametry zostały zweryfikowane w trakcie badań doświadczalnych. W ramach projektu zbudowano stanowisko laboratoryjne oraz opracowano programy do badań identyfikacyjnych dżojstików. W następnym kroku połączono modele serwonapędu oraz dżojstika i wykonano badania symulacyjne całego zestawu, które pokazały najważniejsze właściwości i możliwości sterowania napędem elektrohydraulicznym przez operatora wykorzystującego dżojstik z siłowym sprzężeniem zwrotnym. Wykonano również pierwsze modele systemu sterowania bezprzewodowego. Badano wpływ opóźnienia transmisji na jakość sterowania serwonapędem za pośrednictwem dżojstika.
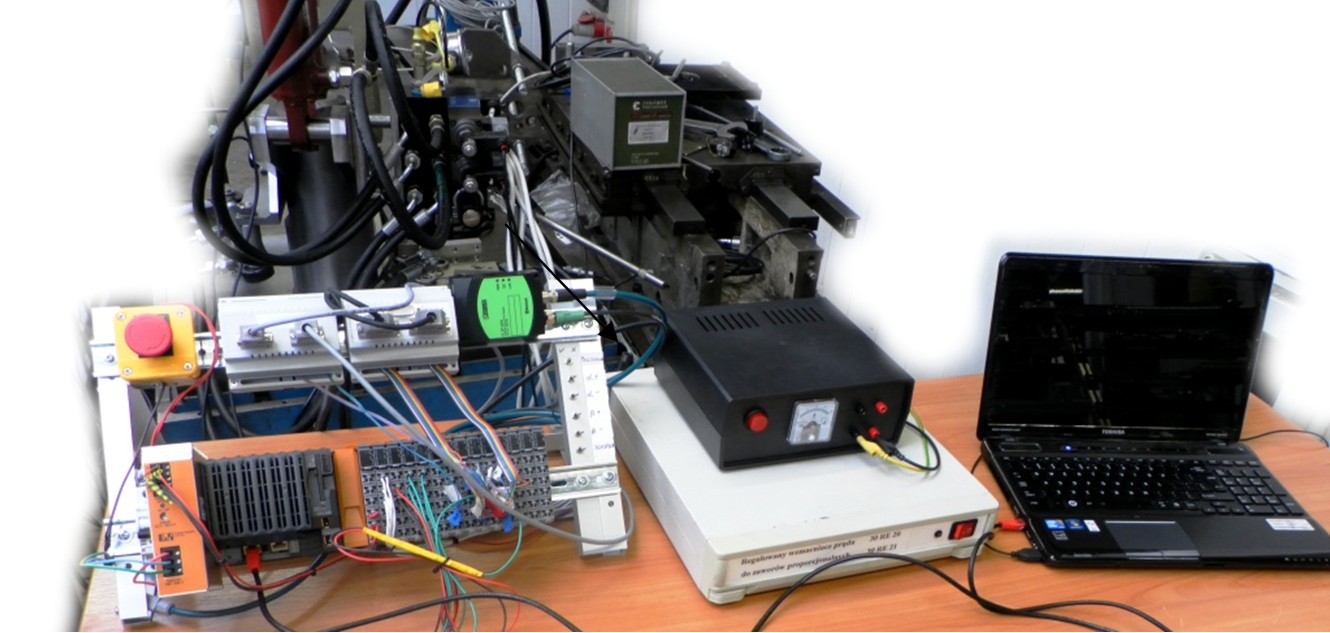
W kolejnym kroku przeprowadzono badania doświadczalne elementów składowych serwonapędów elektrohydraulicznych. Wykonane badania pozwoliły na modyfikacje zbudowanych modeli symulacyjnych. Podobne badania prowadzono w odniesieniu do dżojstików z siłowym sprzężeniem zwrotnym. Zbudowano i oprogramowano system sterujący serwonapędem elektrohydraulicznym za pośrednictwem 1-osiowego dżojstkia z siłowym sprzężeniem zwrotnym. Składał się on ze sterownika serwonapędu tworzącego zestaw nadrzędny, który podłączono z zestawem podrzędnym składającym się ze sterownika głównego oraz karty zaworu. Kolejny obszar wykonanych prac dotyczył możliwości metod bazujących na sztucznej inteligencji do sterowania serwonapędami i urządzeniami mechatronicznymi. Przeprowadzono analizę wybranych metod zwracając szczególną uwagę na możliwości wykorzystania technik uczących do zbudowania autonomicznych np. manipulatorów oraz pojazdów. Przeanalizowano także możliwości wykorzystania metod odpornych na błędy do sterowania urządzeniami przy wykorzystaniu łączności bezprzewodowej. Wykonano również analizę możliwości dostępnych obecnie systemów wizyjnych oraz innych układów przeznaczonych do rozpoznawania stanu otoczenia urządzeń, np. manipulatorów.
 Przeprowadzono także badania identyfikacji i modelowania serwonapędu elektrohydraulicznego za pomocą sztucznej sieci neuronowej. W następnym etapie wykorzystano nauczoną sieć neuronową jako predykator do sterowania serwonapędem. Kolejne badania symulacyjne dotyczyły zastosowania metody Model-Following-Control (MFC) oraz jej rozszerzonej wersji, w której zastosowano strukturę typu MFC/IMC (Model Following Control/Internal Model Control) do sterowania serwonapędem elektrohydraulicznym.
Przeprowadzono także badania identyfikacji i modelowania serwonapędu elektrohydraulicznego za pomocą sztucznej sieci neuronowej. W następnym etapie wykorzystano nauczoną sieć neuronową jako predykator do sterowania serwonapędem. Kolejne badania symulacyjne dotyczyły zastosowania metody Model-Following-Control (MFC) oraz jej rozszerzonej wersji, w której zastosowano strukturę typu MFC/IMC (Model Following Control/Internal Model Control) do sterowania serwonapędem elektrohydraulicznym.
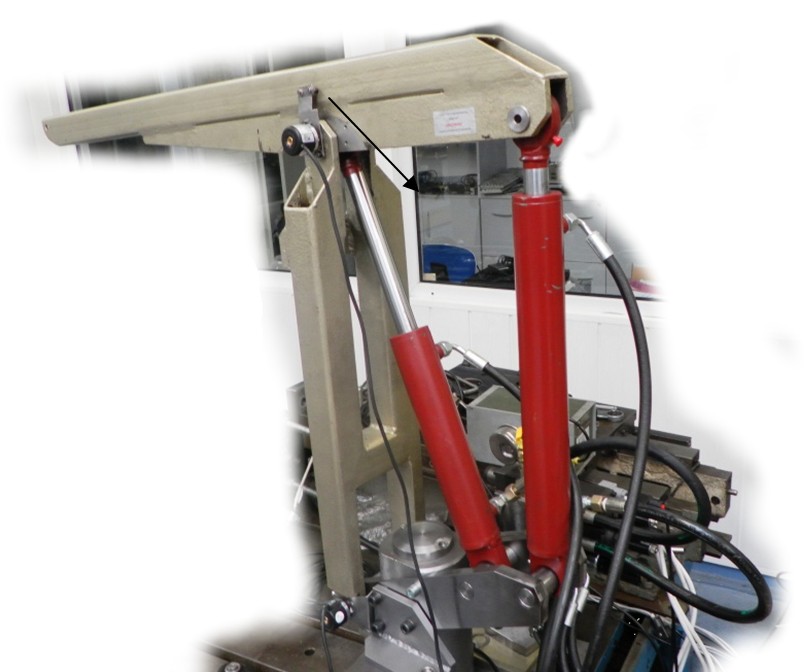
Dalsze prace prowadzono wykorzystując mały 3-osiowy manipulator z napędami z silnikami krokowymi, który sterowano dżojstikiem 3-osiowym z hamulcami magneto-reologicznymi. Zbudowano 3-osiowy, tensometryczny czujnik do pomiaru sił występujących na końcówce manipulatora. Wszystkie te układy połączono z komputerem klasy PC, w którym były zamontowane odpowiednie karty we/wy oraz zaimplementowane oprogramowanie Matlab-Simulink. W środowisku tym opracowano odpowiednie algorytmy i przeprowadzono badania sterowania manipulatorem dżojstikiem z siłowym sprzężeniem zwrotnym. Wykonane badania obejmowały także opracowanie procedur ograniczających maksymalne siły, prędkości oraz obszar pracy sterowanego urządzenia. Kolejne badania prowadzono także z wykorzystaniem manipulatora z napędami elektrohydraulicznymi. Zaprojektowano oraz wykonano zespoły mechaniczne dla ruchu w 3. osi obrotowej manipulatora. Opracowano, zaprojektowano oraz wykonano i uruchomiono elektroniczny moduł sterujący tym manipulatorem. Połączono go następnie ze sterownikiem nadrzędnym. Zainstalowano, oprogramowano oraz zaimplementowano do układu sterowania system wizyjny, który przeznaczony był do śledzenia ruchów dłoni operatora i przekazywania informacji o tych ruchach do systemu sterowania manipulatorem. Wykonano oprogramowanie, które pozwalało na sterowanie manipulatorem z napędami elektrohydraulicznymi na podstawie ruchów ręki operatora. W kolejnym etapie zbudowano system wykorzystujący kamerę do nadzorowania pracy i sterowania manipulatorem z napędami elektrohydraulicznymi w przypadku awarii elementu pomiarowego. Dzięki zastosowaniu kamery i oprogramowania do nadzorowania pracy manipulatora, sterownik wykrywał uszkodzenie, np. elementu pomiarowego (enkodera) i przejmował sterowanie wykorzystując sygnał z kamery jako sprzężenie zwrotne. Zastosowaniu systemu wizyjnego pozwalało także na rozpoznawanie możliwości wystąpienia kolizji z otoczeniem.
 W ramach projektu opracowano też kilka modeli wirtualnych napędu elektrohydraulicznego w Virtual Reality Toolbox z pakietu Matlab/Simulink. Zaimplementowano sterowanie tym modelem za pomocą dżojstika. Sygnał analogowy położenia dżojstika doprowadzono do modelu poprzez wejścia karty RT-DAC. Podobnie przekazywano sygnały z modelu do dżojstika. Sterowanie położeniem elementu wykonawczego manipulatora było wykonywane przez operatora, który obserwował położenie siłownika na ekranie komputera. Układ ten użyto do symulacji i badania zderzeń siłownika z przeszkodą. Dalsze prace dotyczące sterowania manipulatorem elektrohydraulicznym przy braku widoczności i przy zastosowaniu łączności bezprzewodowej prowadzono po napisaniu oprogramowania w środowisku Microsoft Visual Studio 2008, wykorzystując silnik graficzny Irrlicht w wersji 1.7.2. Umożliwia on importowanie modeli ze znanych programów 3D, między innymi takich jak AutoCad lub Inventor. Wykonano uproszczony rysunek manipulatora pokazujący zmianę położenia jego ramion. Zaimplementowano również automatyczne wykrywanie kolizji z elementami otoczenia. W opracowanym systemie, operator widział ruchy wirtualnego manipulatora oraz przeszkodę na ekranie. Całość aplikacji testowano najpierw wirtualnie. W kolejnych etapach połączono środowisko wirtualne ze sterownikiem PLC, pracującym jako Master, który był dalej połączony z dżojstikiem typu haptic. Następnie wykonano połączenie bezprzewodowe z drugim sterownikiem PLC, pracującym jako Slave, który z kolei był odpowiedzialny za bezpośrednie sterowanie manipulatorem.
W ramach projektu opracowano też kilka modeli wirtualnych napędu elektrohydraulicznego w Virtual Reality Toolbox z pakietu Matlab/Simulink. Zaimplementowano sterowanie tym modelem za pomocą dżojstika. Sygnał analogowy położenia dżojstika doprowadzono do modelu poprzez wejścia karty RT-DAC. Podobnie przekazywano sygnały z modelu do dżojstika. Sterowanie położeniem elementu wykonawczego manipulatora było wykonywane przez operatora, który obserwował położenie siłownika na ekranie komputera. Układ ten użyto do symulacji i badania zderzeń siłownika z przeszkodą. Dalsze prace dotyczące sterowania manipulatorem elektrohydraulicznym przy braku widoczności i przy zastosowaniu łączności bezprzewodowej prowadzono po napisaniu oprogramowania w środowisku Microsoft Visual Studio 2008, wykorzystując silnik graficzny Irrlicht w wersji 1.7.2. Umożliwia on importowanie modeli ze znanych programów 3D, między innymi takich jak AutoCad lub Inventor. Wykonano uproszczony rysunek manipulatora pokazujący zmianę położenia jego ramion. Zaimplementowano również automatyczne wykrywanie kolizji z elementami otoczenia. W opracowanym systemie, operator widział ruchy wirtualnego manipulatora oraz przeszkodę na ekranie. Całość aplikacji testowano najpierw wirtualnie. W kolejnych etapach połączono środowisko wirtualne ze sterownikiem PLC, pracującym jako Master, który był dalej połączony z dżojstikiem typu haptic. Następnie wykonano połączenie bezprzewodowe z drugim sterownikiem PLC, pracującym jako Slave, który z kolei był odpowiedzialny za bezpośrednie sterowanie manipulatorem.
Wykonane prace pozwoliły na rozpoznanie tematyki i pozyskanie wiedzy, która może być wykorzystana do sterowania urządzeniami mechatronicznymi za pośrednictwem dżojstików typu haptic. W ramach projektu zastosowano system wizyjny do nadzorowania pracy sterowanych urządzeń oraz opracowano własne algorytmy sterowania badanych systemów. Badano również możliwości:
- pracy omawianego systemu przy ograniczonej widoczności,
- wykorzystania łączności bezprzewodowej w sterowaniu,
- wykrywanie kolizji i awarii systemu,
- sterowanie odporne na błędy.
Uzyskane rezultaty stanowią podstawę do prowadzenia dalszych badań oraz pozwolą na wdrożenie wyników do praktyki przemysłowej.