Badania zastosowania systemu wizyjnego do nadążnego sterowania manipulatorem
mgr inż. Piotr OWCZAREK
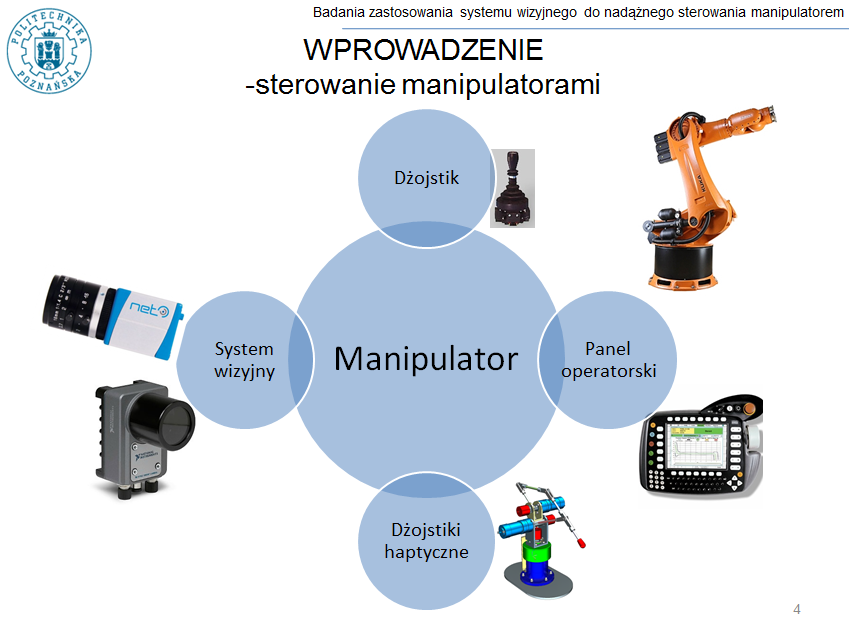
W dzisiejszych czasach manipulatory są szeroko stosowane w wielu gałęziach przemysłu. Do ich głównych zadań należy: przenoszenie przedmiotów oraz paletyzacja. Obecnie programowanie manipulatorów odbywa się przez wyspecjalizowanych programistów, a sygnały zadawane do manipulatora pochodzą z paneli kontrolnych lub dżojstików. Pomimo tego programowanie manipulatora jest czynnością bardzo trudną i czasochłonną. Autor niniejszej pracy proponuje zastosowanie systemu wizyjnego jako elementu pośredniczącego pomiędzy człowiekiem, a manipulatorem do nadążnego sterowania oraz programowania trajektorii ruchu.
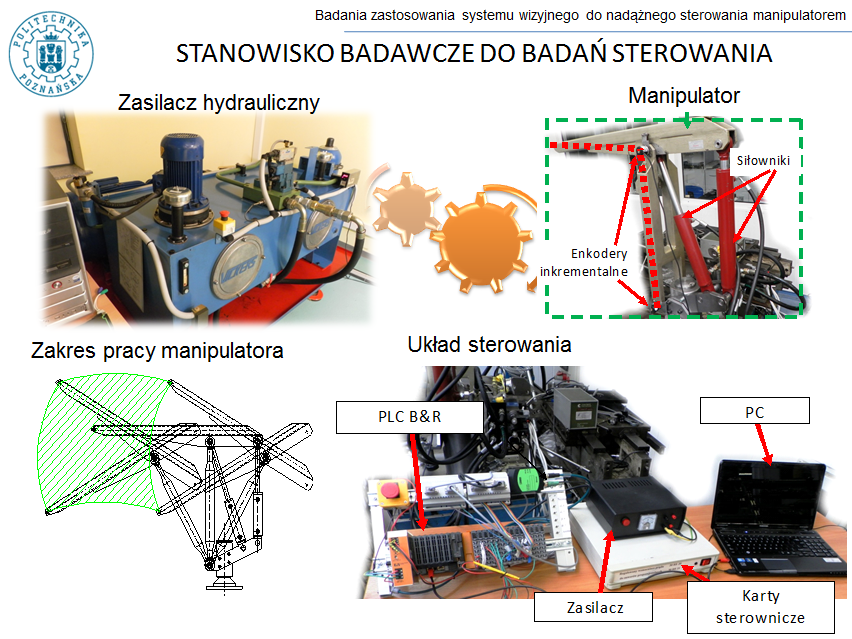
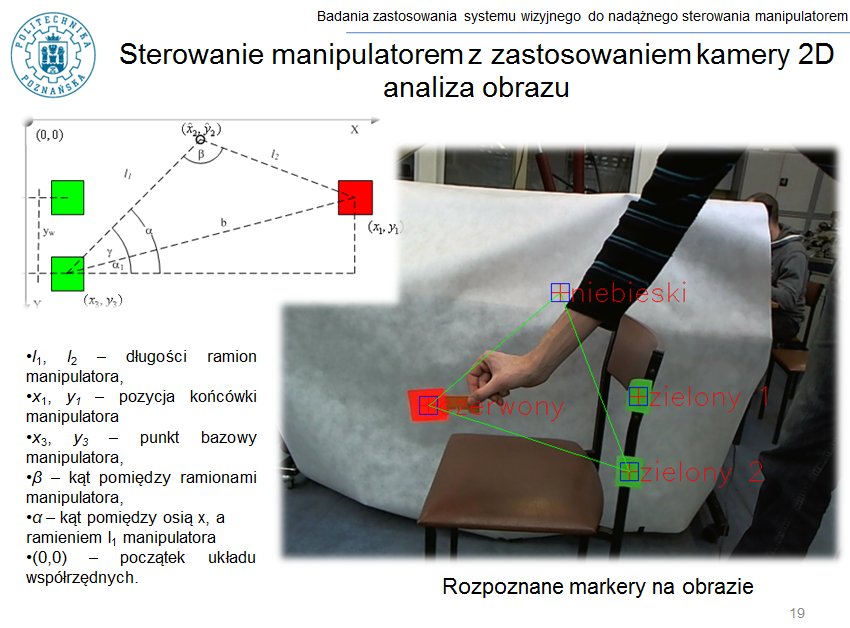
Prowadzone prace w trakcie doktoratu zostały ukierunkowane na budowie stanowiska badawczego, którym jest manipulator z napędami elektrohydraulicznymi połączony z sterownikiem PLC. Kolejnymi krokami była integracja systemu wizyjnego z sterownikiem manipulatora, a następnie napisanie oprogramowania do przetwarzania obrazu z kamery 2D. Przeprowadzone badania były ukierunkowane na przetwarzaniu obraz w celu analizy i detekcji markerów. Jeden marker trzymany w dłoni operatora wyznaczał punkt końcówki manipulatora, pozostałe dwa markery zostały wykorzystane do określenia punktu bazowego manipulatora oraz przeskalowania obrazu. Kolejne badania zostały ukierunkowane na zastosowaniu kamery 3D, oprogramowaniu i sterowaniu manipulatorem bez wykorzystania markerów. Aplikacja śledziła bark i dłoń człowieka jako sygnały zadające do manipulatora.
Teza pracy
Rozprawa doktorska zmierza do weryfikacji tezy:
System wizyjny może umożliwić człowiekowi programowanie trajektorii ruchu manipulatora.
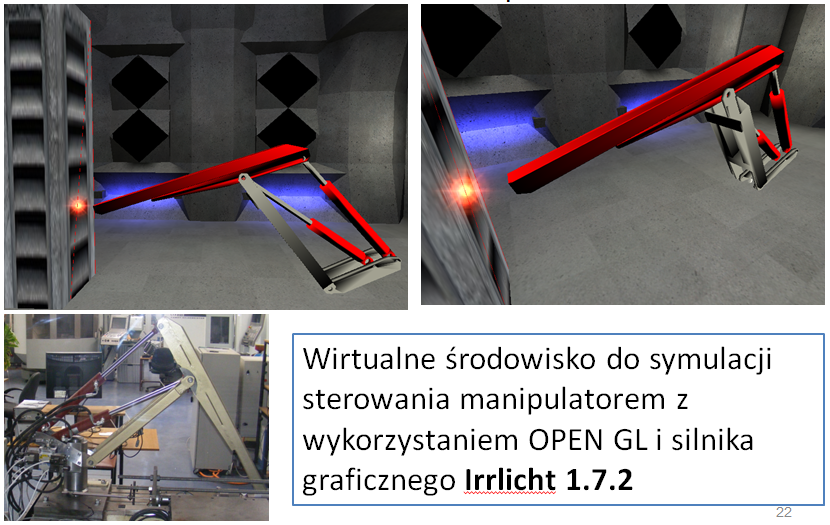
Zastosowanie wirtualnego środowiska do symulacji sterowania manipulatorem