System zakupiono ze środków MNiSW w ramach Dużej Aparatury Badawczej Projekt nr 86/2012
Opracowanie nowoczesnych sterowników urządzeń produkcyjnych jest złożonym procesem wymagającym przeprowadzenia wielu prób oraz modyfikacji. Proces ten może być w sposób znaczący przyspieszony poprzez zastosowanie systemów do szybkiego prototypowania układów sterowania. Pozwalają one na tworzenie metodą „złap, połóż i połącz” złożonych struktur regulacyjnych z wcześniej utworzonych bloczków i funkcji, które reprezentowane są przez charakterystyki graficzne. Zadanie to wykonywane jest w środowisku programowym Matlab-Simulink. Tak zbudowany regulator może być szybko przesłany do zawansowanego sterownika, wyposażonego w moduły wejść i wyjść, w którym każdemu z bloczków przyporządkowany zostaje automatycznie podprogram. Tym zaawansowanym sterownikiem jest sprzęt i oprogramowanie dSpace. Tym sposobem powstaje kompletny program sterujący, który może być uruchomiony testowany z podłączonym on-line obiektem regulacji. System taki może być wykorzystywany do prowadzenia badań nad zastosowaniem złożonych algorytmów sterujących urządzeniami mechatronicznymi. Takie właśnie prace prowadzone są w Zakładzie Urządzeń Mechatronicznych na Wydziale Budowy Maszyn i Zarządzania PP, który wyposażony jest w kompletny zestaw laboratoryjny składający się z dwóch głównych ściśle współpracujących ze sobą elementów:
- pakietu sprzętowego symulatora, sterowników, elementów komunikacyjnych oraz modułów wejść wyjść dSpace,
- oprogramowanie Matlab-Simulink z najważniejszymi przybornikami (toolboxami) i pomocniczymi programami narzędziowymi.

Rys. 1. Zdjęcie zakupionego sprzętu
Pakiet symulatora sprzętowego jest produktem firmy dSpace kierowanym do zastosowań związanych z szybkim projektowaniem zaawansowanych technik i układów sterowania urządzeniami mechatronicznymi. System składa się trzech głównych modułów:
- symulatora przeznaczonego do implementacji techniki Hardware-In-the-Loop wyposażonego w dodatkowy sprzęt dedykowany dla testowania sterowników,
- systemu prototypowego do sterowania urządzeniami w 3 osiach, w skład którego wchodzi zestaw kart procesorowych wyposażonych w wydajne procesory, gwarantujące wysokie osiągi oraz szybki dostęp do urządzeń wejścia/wyjścia,
- akcesoriów dla systemów modularnych, które przyspieszają pracę na projektem systemu sterowania, ułatwiając dostęp do sprzętowych modułów I/O aby ułatwić pracę w warunkach laboratoryjnych i przemysłowych (np. projektowanie sterownika pojazdu, robota, maszyny obróbczej itp.).
Zakład Urządzeń Mechatronicznych posiada następujące podzespoły urządzenia:
Karta procesorowa dSpace DS1006 (3 szt.) o następujących parametrach:
- Technologia x86 (Quad-Core AMD Opteron 2.8 GHz)
- 4 rdzeniowy procesor
- Zgodność z oprogramowaniem Matlab Simulink
- Pamięć danych cache 4 x 64 KB L1
- Pamięć instrukcji cache 4 x 64 KB L1, 4 x 512 KB L2
- Pamięć lokalna dla aplikacji oraz danych 1 GB DDR2-800 SDRAM
- 4 x 128 MB DDR2-267 SDRAM pamięci host data Exchange
- 2 MB dla bootowania oprogramowania firmware
- Możliwość budowania system wieloprocesorowego
- Dedykowane oprogramowanie do karty:
– do konfigurowania aplikacji czasu rzeczywistego zapewniające pełne wsparcie dla karty sterującej
– wspierające interfejs Ethernet
Karta rozszerzająca dSpace do komunikacji z wykorzystaniem protokołu Ethernet DS921 (3 szt.):
- możliwość integracji z kartą procesorową DS1006
- możliwość komunikacji z wykorzystaniem protokołów TCP/IP i UDP
Dedykowana karta do sterowania silnikami DC, AC, PMSM i BLDC DS5202 oraz AC Motor Control Solution o parametrach:
- możliwość podłączenia sterowania silników DC, AC, PMSM i BLDC
- obsługa 3 wejść enkodera inkrementalnego
- obsługa 3 wejść dla czujników Halla
- obsługa 8 kanałów wejść analogowych
- obsługa 2 kanałów wyjść analogowych
- pełne wsparcie programowe dla sterowania silnikami DC, AC, PMSM i BLDC
Uniwersalny moduł sterujący programowalnymi końcówkami mocy dSpace RapidPro Power Unit o parametrach (3 szt.):
- Port USB do komunikacji z komputerem PC
- Interfejs SPI do diagnostyki
- Wewnętrzny monitor napięcia i temperatury
- Możliwość zdalnego uruchamiania urządzenia
- Możliwość rozłączenia wszystkich wyjść jednocześnie
- Możliwość zdefiniowania stanu określające moment wyłączenia urządzenia
Końcówka mocy typu pełny mostek H dSpace RapidPro Power Unit DS1661 o następującej specyfikacji (5 szt.):
- 2 kanałowy pełnego mostka H
- Zajmowanie jednego slotu w module mocy
- Wydajność co najmniej 5A prąd ciągły,
- Maksymalne napięcie zasilania 40 V (napięcie ciągłe)
- Możliwość wykorzystania jako: low/high side driver, pełny / pół mostek
- Możliwość ustawienia ograniczenia natężenia prądu oraz czasu wyłączenia
- Pomiar prądu z filtrem dla 2 kanałów
- Zabezpieczenie przeciążeniowe, temperaturowe, przeciwzwarciowe
- Wbudowane zabezpieczenie dla napięcia poza zakresem – 100 – 100 V.
Karta mocy pół mostka dSpace RapidPro Power Unit DS1668 o następującej specyfikacji (4 szt.):
- 2 kanałowy wysoko prądowy moduł pół mostka
- Wydajność: co najmniej 25A RMS prąd ciągły (w zależności od wpływu temperatury), wartość szczytowa co najmniej 30A (1 s)
- Możliwość zastosowania jako pół-mostek lub jako górna lub dolna część pełnego mostka
- Pomiar prądu z dolnoprzepustowym filtrem dla 1 kanału
- Zabezpieczenie przeciążeniowe, temperaturowe, przeciwzwarciowe
- Diagnostyka błędów
Uniwersalna karta wejść/wyjść dSpace DS2201 oraz panel przyłączeniowy CP2201 i LP2201 o parametrach
(1 szt.):
- 20 kanałów analogowo-cyfrowych z 5 odseparowanymi przetwornikami ADC
- 8 równoległych przetworników cyfrowo-analogowych
- interfejs szeregowy
- rozdzielczość 12 bit dla konwersji A/D
- czas konwersji A/D 32,5 us dla wszystkich 20 wejść
- 12 bit dla konwersji D/A
- czas konwersji D/A 6 us
- napięcie wejściowe/wyjściowe +/- 10 V
- 16 linii I/O cyfrowych
- 8 linii licznikowych
- 1 wejście obsługujące przerwania
- linie I/O pracujące w standardzie TTL
- interfejs szeregowy Serial UART, RS232
- możliwość pomiaru częstotliwości sygnału (kwadraturowego dla 1, 2 lub 4 kanałów)
- generacja sygnału PWM pracującego z częstotliwością do co najmniej 6,25 MHz oraz rozdzielczością 160 ns (40 ns dla okresu PWM poniżej 2,6 ms)
Karta enkoderowa dSpace DS3001 oraz panel przyłączeniowy CP3001 o następujących parametrach (1 szt.):
- 5 wejść enkoderów inkrementalnych
- 24 – bitowy licznik
- maksymalna częstotliwość wejściowa 1,25 MHz
- standard pracy TTL
- możliwość pracy w trybie kwadraturowym (zliczanie każdego zbocza)
Karta enkoderowa dSpace DS3002 oraz panel przyłączeniowy CP3002 o następujących parametrach (1 szt.):
- 6 wejść enkoderów inkrementalnych
- 32 – bitowy licznik
- maksymalna częstotliwość wejściowa 750 kHz
- standard pracy TTL
- możliwość pracy w trybie kwadraturowym (zliczanie każdego zbocza)
Karta przetwornika analogowa/cyfrowego dSpace DS2002 oraz panel przyłączeniowy CP2002 o następujących parametrach:
- 32 kanały wejściowe ADC
- rozdzielczość 4, 8, 12, 16 bit (programowalna)
- zakres -/+ 5 V lub -/+ 10 V (programowany)
- czas konwersji co najmniej 66,9 us (16 bit przy wszystkich pracujących kanałach)
Karta przetwornika cyfrowo analogowego dSpace DS2102 oraz panel przyłączeniowy CP2102 o następujących parametrach:
- co najmniej 6 kanałów wyjściowych analogowych
- rozdzielczość – 16 bit
- programowalne zakresy: -/+ 5V, -/+ 10V lub 0 – 10 V (programowalny))
- minimalny czas próbkowania 1.6us
- reset do 0 V w przypadku awarii
Karta wejść-wyjść cyfrowych wraz licznikami dSpace DS4002 oraz panel przyłączeniowy CP4002:
- co najmniej 8 kanałów licznikowych pracujących z minimalną rozdzielczością 200 ns
- każdy kanał niezależnie programowany
- szybka dwuportowa pamięć RAM do przechowywania danych
- 32 cyfrowe, programowalne wejścia wyjścia (standard TTL)
- 2 zewnętrzne linie typu trigger (wyzwalające).
Oprogramowanie:
- Matlab Simulink 2012b wraz z niezbędnymi toolboxami wymaganymi do automatycznej generacji kodu. Pakiet Matlab-Simulink jest niezbędny do modelowania obiektów sterowania i sterowników oraz oprogramowania kart wejść/wyjść. Pozwala na tworzenie zarówno schematów blokowych i algorytmów sterowania, jak i na ich bezpośrednie skompilowanie do języków maszynowych – oprogramowania kart wejść wyjść. Oprogramowania Matlab-Simulink zawiera narzędzia pozwalające na łatwą implementację metod bazujących na sztucznej inteligencji. Dodatkowo środowisko Matlab-Simulink pozwala na akwizycję danych oraz wizualizację procesów.
- środowisko dSpace (dSpace RTI, RTI_ETH, RTI_MP, ControlDesk, ConfigurationDesk, MLIB/MTRACE) zapewniające komunikację oraz obsługujące sprzęt.
Sterownik przemysłowy typu B&R X20CP1586 o następujących parametrach (2 szt.):
- Procesor: kompatybilny z ATOM 1,6 MHz,
- Pamięć: co najmniej 512 MB DDR2 DRAM, 1 MByte SRAM,
- Wymienna pamięć programu: CompactFlash 512 MB
- 1 interfejs POWERLINK V1/V2 (do połączenia rozproszonych I/O)
- 2 interfejsy USB
- 1 interfejs RS232
- 1 interfejs Ethernet 10/100/1000 Base-T
- 1 gniazdo na dodatkowe interfejsy sieci Fieldbus
- Zintegrowany moduł zasilający
- Zasilanie 24VDC
- Stojak
Panel operatorski typu B&R PowerPanel 500 o przekątnej ekranu 10,4”ze zintegrowanym ze sterownikiem
(2 szt.):
- Ekran 10.4” VGA TFT kolorowy, dotykowy
- CPU zgodne z ATOM 1600 MHz
- Pamięć: co najmniej SO-DIMM DDR2 RAM 2048
- Wymienna pamięć programu: CompactFlash 512 MB
- 1 interfejs POWERLINK V1/V2 (do połączenia rozproszonych I/O)
- 3x interfejsy USB 2.0
- 1x interfejs RS232
- 1 x interfejs Ethernet 10/100/1000
- Stojak
Komputer przemysłowy Automation PC o następujących parametrach (1 szt.):
- Procesor: kompatybilny z Core2 Duo L7400 1.5 GHz, 667 MHz FSB, 4 MB L2 cache
- Pamięć: co najmniej SO-DIMM DDR2 RAM 2048 MB, 1 MByte SRAM,
- Wymienna pamięć programu: CompactFlash1 GByte
- 1 interfejs POWERLINK V1/V2 (do połączenia rozproszonych I/O)
- 2 HUB
- 1 MB SRAM,
- 1 interfejs Ethernet wraz z kontrolerem
- Zasilanie 24VDC
- Stojak
Moduł serwonapędu o typu B&R ACOPOS1010 następujących parametrach (3 szt.):
- Moduł mocy 3x 400-480 V,
- Wydajność 1.0 A, 0.45 kW, linefilter,
- Rezystor bocznikowy i elektroniczny
- Zabezpieczenia restartu
- Inteferjs POWERLINK V2
- Interfejs rezolwera 10 kHz
- Stojak
Stacja I/O IP20 rozproszona na POWERLINK (5 szt.)
- Interfejs POWERLINK V1/V2
- Zintegrowany hub 2x RJ45
- Moduł zasilający
- Zasilanie 24VDC
Lokalne moduły I/O typu B&R w obudowach IP20 (po 1 szt.):
- Moduł 12 wejść dyskretnych 24VDC, z konfigurowanym filtrem wejściowym (3 szt.)
- Moduł 12 wyjść dyskretnych 24VDC 0,5 A (3 szt.)
- Moduł uniwersalny: 4 wejścia dyskretne 24VDC, 2 wyjścia dyskretne 24VDC, 0,5A, 1 wejście analogowe: 12-bit, ±10 V lub 0…20 mA/4… 20 mA, 1 wyjście analogowe: 12-bit, ±10 V lub 0…20 mA, 2 liczniki konfigurowane jako liczniki zdarzeń lub pomiar brakowania (3 szt.)
- Moduł analogowy wejściowy: ±10 V or 0 to 20 mA/4 to 20 mA, konfigurowalny filtr, rozdzielczość 12 bit, 4 wejścia (3 szt.)
- Moduł analogowy wejściowy: ±10 V / 0 to 20 mA,, konfigurowalny filtr, rozdzielczość 16 bit, 4 wejścia (3 szt.)
- Moduł analogowy wyjściowy: ±10 V / 0 to 20 mA, rozdzielczość 12 bit, 4 wejścia (3 szt.)
- Moduł analogowy wyjściowy: ±10 V / 0 to 20 mA, rozdzielczość 16 bit, 4 wejścia (3 szt.)
- Niezbędne podstawki i moduły zacisków
- Moduł pomiaru temperatury, 4 rezystancyjne wejścia, obsługa PT100, PT1000, 0.1 K rozdzielczość, 3 przewodowe połączenie (3 szt.)
- Moduł pomiaru temperatury, 6 wejść termoparowych, obsługa J, K, N, S, 0.1 K rozdzielczość (3 szt.)
- Moduł enkoderowy, standard 24 V, praca w trybie kwadratury (zliczanie każdego zbocza), częstotliwość pracy 100 kHz (3 szt.)
- Moduł enkoderowy, standard 5 V, praca w trybie kwadratury (zliczanie każdego zbocza), częstotliwość pracy 600 kHz (3 szt.)
Stacja I/O typu B&R w obudowie IP67 rozproszona na POWERLINK (5 szt.)
- Interfejs POWERLINK V1/V2
- Zasilanie 24VDC
- Stopień ochrony IP67 (montaż poza szafą sterowniczą)
- 8 kanałów dyskretnych 24VDC konfigurowanych jako wejścia lub wyjścia 0,5A, 2 liczniki konfigurowane jako liczniki zdarzeń lub pomiar brakowania
Analizator sygnałów napięciowych analogowych NI PXIe-6363 (1 szt):
- 32 wejścia analogowe, 2 MS/s 1-channel, 1 MS/s multichannel; 16-bit, +/- 10 V
- 4 wyjścia analogowe, 2.86 MS/s, 16-bit, +/- 10 V
- 48 cyfrowe wejścia/wyjścia
- 4 32-bit liczniki obsługujące sterowanie PWM, enkoder, pomiar częstotliwości
Analizator mostkowych sygnałów analogowych NI PXIe-4330 (1 szt):
- 8 równoległych próbkowanych wejść analogowych, 25 kS/s na kanał
- 24-bit ADC na każdym kanale, filtr antyaliasingowy
- Programowane napięcie ekscytacji (0.625 V do 10 V)
- Obsługa pomiarów mostkowych, pół mostkowych i ćwierć mostkowych
Moduł wejść analogowych NI PXIe-4492 (1 szt):
- 8 równoległych próbkowanych wejść analogowych, 204.8 kS/s na kanał
- 24-bit ADC w zakresie dynamicznym 114 dB
- dokładność wszystkich 8 kanałów pozwala na przeprowadzenie większości pomiarów NVH
System wizyjny umożliwiający wymianę danych ze sterownikiem po Ethernet TCP/IP lub POWERLINK z kamerą kolorową ze zintegrowanym procesorem Intel Atom 1.6 GHz i systemem czasu rzeczywistego wyposażona w:
- 512 MB pamięci operacyjnej, 2 GB pamięci dyskowej flash
- rozdzielczość przetwornika 1600 x 1200 pikseli
- akwizycja maksymalnie 10 fps
- 4 wejścia cyfrowe, 4 wyjścia cyfrowe, port RS232, port Gigabit Ethernet
- zintegrowany zasilacz do wysterowania oświetlaczy LED, maks 500mA
- obudowa wodoodporna zgodnie z IP67, podłączenie sygnałów poprzez konektory typu M12
- możliwość programowania w środowisku LabVIEW Real-Time
- zestaw niezbędnych przewodów przyłączeniowych i zasilacz do kamery
- obiektyw o ogniskowej 16mm, klasa 3MP, o niskich zniekształceniach
- obiektyw o ogniskowej 25mm, klasa 3MP, o niskich zniekształceniach
- obiektyw o ogniskowej 35mm, klasa 3MP, o niskich zniekształceniach
- oświetlacz LED typu „ring”, biały, przystosowany do pracy z powyższą kamerą
- uchwyt do zamocowania oświetlacza
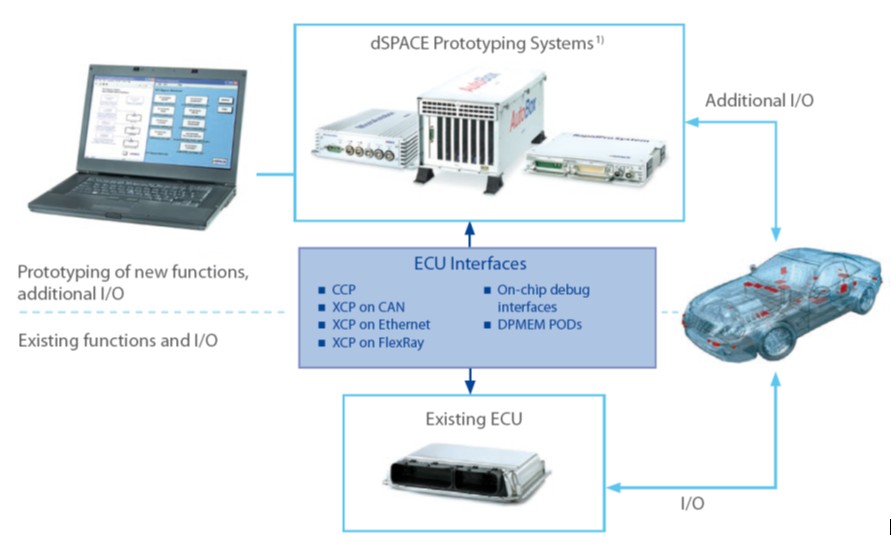
Rys. 2. Schemat blokowy konfiguracji przeznaczonej do projektowania sterowników
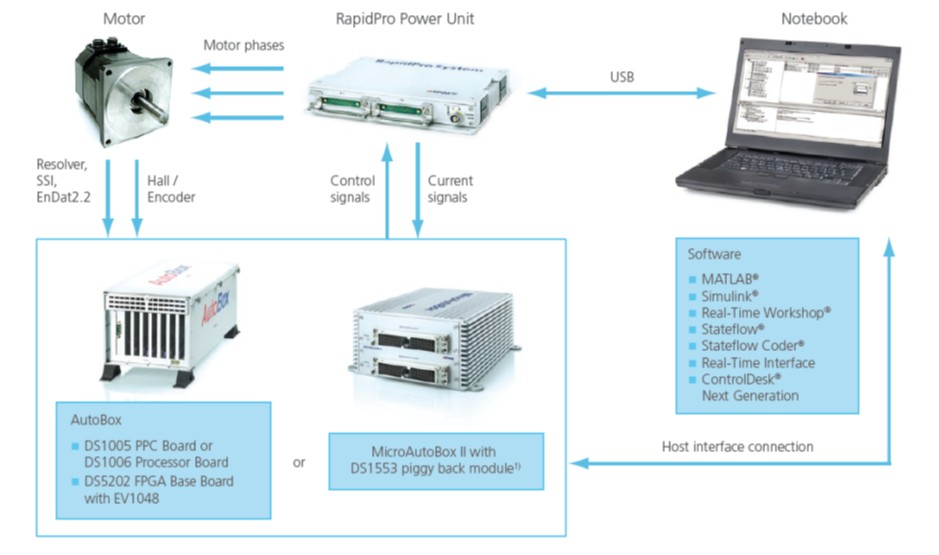
Rys. 3. Schemat blokowy konfiguracji przeznaczonej do implementacji sterowania napędem
Zestaw umożliwia prowadzenie prac związanych z:
- szybkim prototypowaniem sterowników – Rapid Control Prototyping – RCP
- symulacją obiektu sterowania – Hardware In the Loop – HIL
- symulacją oprogramowania – Software in the Loop (SIL),
Poza możliwością szybkiej generacji kodu programu sterującego z modeli blokowych, system pozwala także na testowanie poprawności algorytmów sterujących w warunkach ustalonych i awaryjnych.

Rys. 4. Zdjęcie uruchomionego stanowiska badawczego do sterowania miniaturowych robotów z systemem DSpace

Rys. 5. Zdjęcie uruchomionego stanowiska badawczego z systemem DSpace
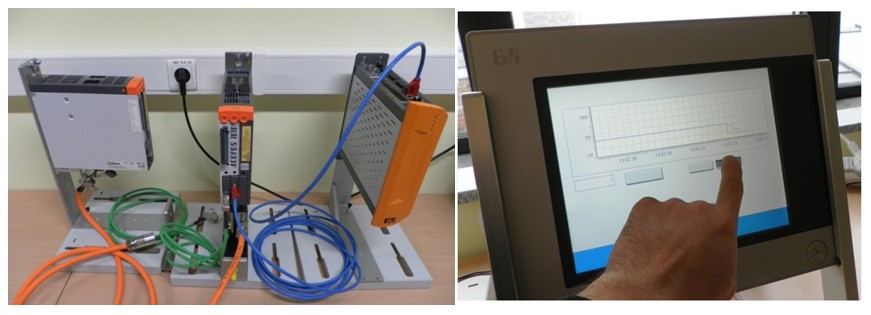
Rys. 6. Moduły do prototypowania nowoczesnych układów sterowania silnikami oraz wizualizacji
Możliwe jest prowadzenie badań w zakresie:
- projektowania urządzeń mechatronicznych takich jak manipulatory, roboty mobilne, elementy napędowe maszyn (np. CNC), specjalistycznych urządzeń pracujących na liniach produkcyjnych,
- badania napędów elektrohydraulicznych (układów napędowych, zaworów proporcjonalnych oraz elkrohydraulicznych),
- symulacji dynamiki maszyn w programie Matlab, w tym automatycznej generacji kodu z wykonanych modeli a następnie wykorzystaniu go w sterowaniu,
- automatyzacji procesów technologicznych z wykorzystaniem techniki mikroprocesorowej, przemysłowych sterowników programowalnych i systemów wizualizacji,
- zastosowaniami zaawansowanych technik sterowania optymalnego, wykorzystującego modelowanie oraz techniki nieliniowe,
- badań nad zastosowaniem sztucznej inteligencji w systemach sterowania,
- konstrukcji i badań sterowania urządzeń wykorzystujących nowoczesne materiały, tzw. inteligentne,
- badań nad zastosowaniami systemów wizyjnych, rozpoznających mowę oraz interakcji ze środowiskiem rzeczywistości wirtualnej,
- badań urządzeń z siłowym sprzężeniem zwrotnym, nazywanych dżojstikami haptycznymi,
- budową i badaniem zaawansowanej aparatury medycznej.
Przykład wykorzystania systemu:
Prezentowany system wykorzystano do badani częstotliwości drgań własnych elementów mechanicznych zaworu hydraulicznego. Do badania przemieszczeń wykorzystano zastosowano czujnik laserowy PHILTEC D47. Prezentowany czujnik pracuje w dwóch zakresach: bliskim (duża rozdzielczość, wąski zakres pomiarowy, ten przypadek jest na rysunku), dalekim (mniejsza rozdzielczość, szerszy zakres pomiarowy). Wyjście czujnika to sygnał analogowy 0 – 5V. Sygnał jest proporcjonalny do wielkości szczeliny między czołem czujnika, a przemieszczanym przedmiotem (dla danego zakresu, według charakterystyki czujnika). Wyjście sygnałowe czujnika zostało podłączone do modułu przyłączeniowego wchodzącego w skład zestawu dSPACE. Dane pomiarowe zarejestrowano przy użyciu przetwornika analogowo cyfrowego (16 bit). Prezentowane sygnały to odpowiedź skokowa układu (ściślej powrót układu do stanu początkowego, nienapięte elementy podatne).
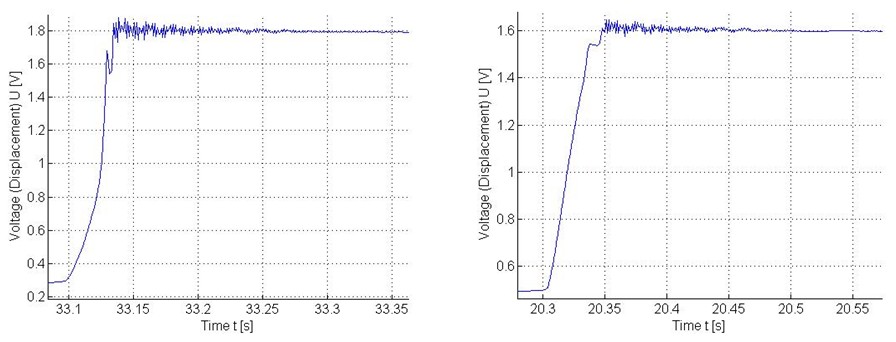
Rys. 7. Przebiegi zebrane przy pomocy systemu DSpace
Wykorzystując możliwości opisywanego systemu napisano artykuł:
Application of hardware in the loop technology for testing servo drives with synchronous motor, Dominik Rybarczyk, Piotr Owczarek, Jarosław Gośliński (przyjęty do publikacji w czasopiśmie „Pomiary Automatyka Robotyka”).
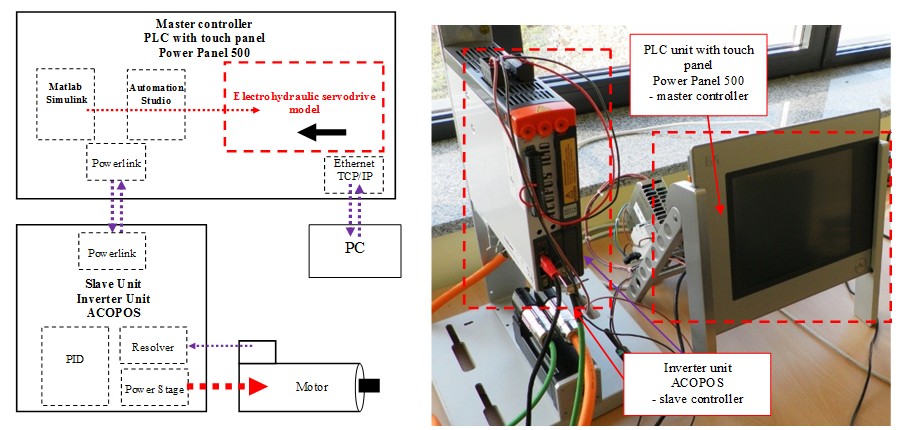
Rys. 8. Schemat systemu oraz wygląd stanowiska zawartego w artykule