System do szybkiego prototypowania układów sterowania
Opracowanie nowoczesnych sterowników urządzeń produkcyjnych wymaga wykonania wielu prób i modyfikacji. Proces projektowania tego typu systemów może być znacząco usprawniony i przyspieszony dzięki zastosowaniu systemu do szybkiego prototypowania sterowników, którego zakup jest przedmiotem niniejszego wniosku. W skład stanowiska wchodzą:
– pakiet sprzętowego symulatora, sterownika, komunikacji i akcesoriów (rys. 2, 3),
– oprogramowanie Matlab-Simulink z przybornikami (toolboxami) i pomocniczymi programami narzędziowymi.
Zakupiony sprzęt oraz oprogramowanie będą stanowiły jedną całość i dzięki dużym możliwościom mogą być uznane za dużą infrastrukturę badawczą. Umożliwią szybkie i efektowne badania nad opracowywaniem zaawansowanych sterowników mechatronicznych urządzeń produkcyjnych.
Pakiet symulatora sprzętowego jest produktem firmy dSpace kierowanym do zastosowań związanych z szybkim projektowaniem zaawansowanych technik i układów sterowania urządzeniami mechatronicznymi. Będzie składał się z następujących głównych modułów:
a) symulatora przeznaczonego do implementacji techniki Hardware-In-the-Loop wyposażonego w dodatkowy sprzęt dedykowany dla testowania sterowników,
b) systemu prototypowego do sterowania urządzeniami w 3 osiach, w skład którego wchodzi zestaw kart procesorowych np. DS1006 oraz kart wejść/wyjść typu np. DS200x, DS2211HIL, DS3001 itp. Zestaw posiada bardzo wydajny procesor, który gwarantuje wysokie osiągi w systemach wieloprocesorowych oraz szybki dostęp do urządzeń wejścia/wyjścia, co pozwala na zbudowanie stanowiska do prototypowania. Może współpracować z innymi modułami za pośrednictwem interfejsów: CAN, LIN, K/L-Line i FlexRay
c) Akcesoriów dla systemów modularnych, które przyspieszają pracę na projektem, ułatwiając dostęp do sprzętowych modułów I/O, by ułatwić pracę zarówno w laboratorium, w pojeździe czy innej lokalizacji.
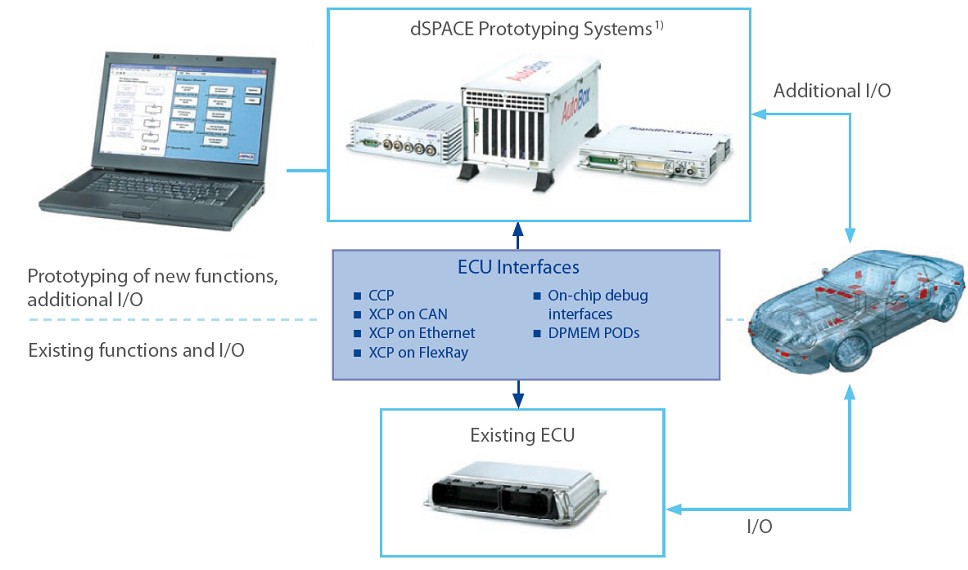
Rys. 2. Schemat blokowy konfiguracji przeznaczonej do projektowania sterowników
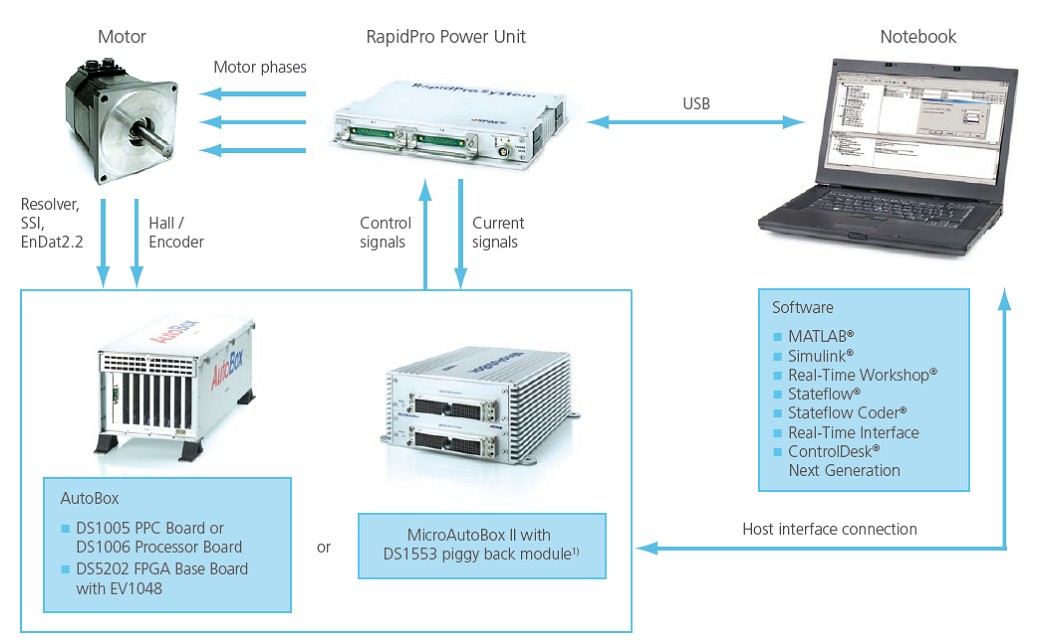
Rys. 3. Schemat blokowy konfiguracji przeznaczonej do implementacji sterowania napędem
Całość ww. zestawu stanowi skalowalny sprzęt dla takich aplikacji jak szybkie prototypowanie sterowników (Rapid Control Prototyping – RCP) i symulacja obiektu sterowania (Hardware In the Loop – HIL). Zestaw będzie wyposażony w bardzo wydajny procesor, który gwarantuje wysokie osiągi w systemach wieloprocesorowych oraz szybki dostęp do urządzeń wejścia/wyjścia, co pozwala na zbudowanie stanowiska HIL spełniającego najnowsze standardy.
Działanie wymienionego wyżej zestawu sprzętowego nie jest możliwe bez odpowiedniego oprogramowania, dlatego planuje się zakupienie następującego oprogramowania:
a) Matlab-Simulink wraz z najważniejszymi przybornikami (toolboxami), który pozwala na modelowanie obiektów sterowania oraz różnorodnych sterowników – wersja badawcza,
b) Implementation Software – zawiera szereg modułów do nadzorowania pracy systemu RCP w czasie rzeczywistym oraz komunikacji, np.: Real-Time Interface (RTI), RTI CAN Blockset, RTI AUTOSAR Package, Ethernet Blocksets, Compiler,
c) Test and Experiment Software – oprogramowanie do testowania wspomaga zarządzanie, oprzyrządowanie i automatyzację eksperymentów, np.: ControlDesk, AutomationDesk, MLIB/MTRACE,
d) TargetLink – oprogramowania do automatycznej generacji kodu sterownika prosto z MATLABa/Simulinka/Stateflow, kodu ANSI C oraz optymalizacji indywidualnych procesorów oraz symulacji i testowania kodu.
Aby umożliwić szybkie opracowywanie działających skutecznie sterowników konieczne jest wykorzystywanie takiej nowoczesnej technologii jak Rapid Control Prototyping (RCP), na którą składają się metody: Hardware in the Loop (HIL), Software in the Loop (SIL), Processor in the Loop (PIL) i Model in the Loop (MIL), które dają możliwość symulacji układów wykonawczych dla różnych rodzajów sterowników, np. mikrokontrolerów, komputerów PC, sterowników PLC itp. Technologia ta pozwala również na szybkie sprawdzenie poprawności algorytmów sterujących nie tylko w ustalonych warunkach, ale również w sytuacjach awaryjnych. Stanowisko HIL będzie symulować układ sterowany a pozostałe stanowiska będą umożliwiały budowanie różnych układów sterowania.
 Pakiet Matlab-Simulink jest niezbędny do modelowania obiektów sterowania i sterowników oraz oprogramowania kart wejść/wyjść. Pozwala na tworzenie zarówno schematów blokowych i algorytmów sterowania, jak i na ich bezpośrednie skompilowanie do języków maszynowych – oprogramowania kart wejść wyjść. Oprogramowania Matlab-Simulink zawiera narzędzia pozwalające na łatwą implementację metod bazujących na sztucznej inteligencji. Dodatkowo środowisko Matlab-Simulink może służyć jako oprogramowanie do akwizycji danych oraz wizualizacji procesów.
Pakiet Matlab-Simulink jest niezbędny do modelowania obiektów sterowania i sterowników oraz oprogramowania kart wejść/wyjść. Pozwala na tworzenie zarówno schematów blokowych i algorytmów sterowania, jak i na ich bezpośrednie skompilowanie do języków maszynowych – oprogramowania kart wejść wyjść. Oprogramowania Matlab-Simulink zawiera narzędzia pozwalające na łatwą implementację metod bazujących na sztucznej inteligencji. Dodatkowo środowisko Matlab-Simulink może służyć jako oprogramowanie do akwizycji danych oraz wizualizacji procesów.
Oprogramowanie wymienione w punktach b), c) i d) umożliwi komunikację między środowiskiem Matlab-Simulink a sprzętem. Sprawi, że planowanie, implementacja i integracja złożonych architektur systemowych i rozproszonych, elektronicznych systemów sterowania stanie się znacznie szybsza i łatwiejsza. Pozwoli także na szybkie opracowanie wygodnych interfejsów użytkownika, które ułatwią opracowywanie zaawansowanych algorytmów sterowania. Oprogramowanie będzie wspierać generowanie kodu dla sterowników mikroprocesorowych w języku C. Zastosowanie stanowiska HIL pozwoli na szybkie tworzenie i testowanie sterowników urządzeń i linii produkcyjnej. Dzięki odpowiednim kartom, np. DS1106 można będzie symulować i projektować sterowanie nawet bardzo złożonych systemów produkcyjnych.


