 WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA
POLITECHNIKA POZNAŃSKA
PRACA DYPLOMOWA
INŻYNIERSKA
Konstrukcja i sterowanie dwunożnym robotem kroczącym
Patryk Nowak
Promotor:
dr inż. Dominik Rybarczyk
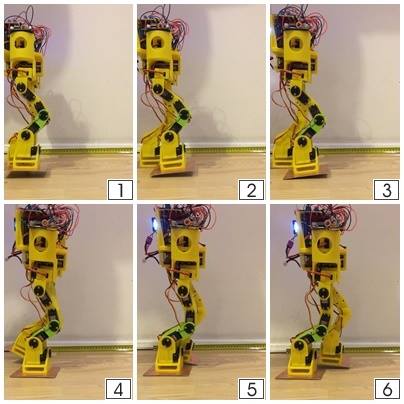
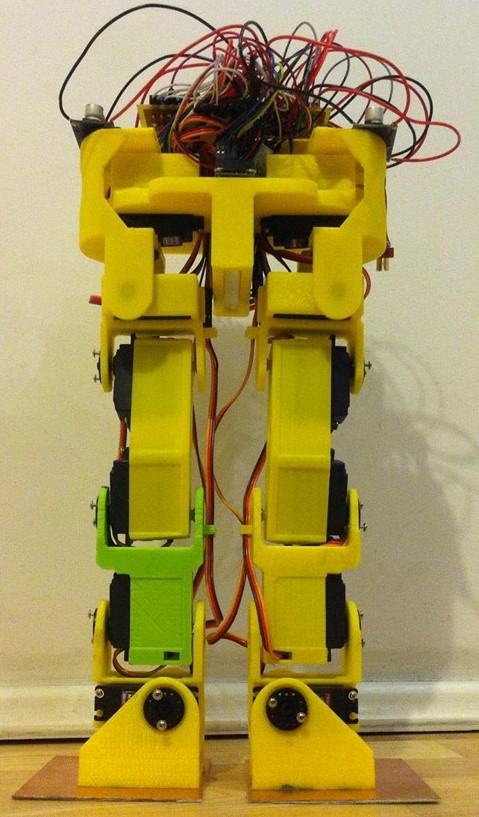
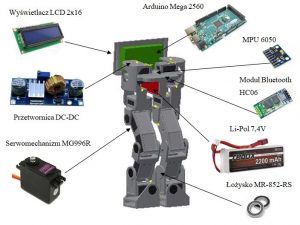
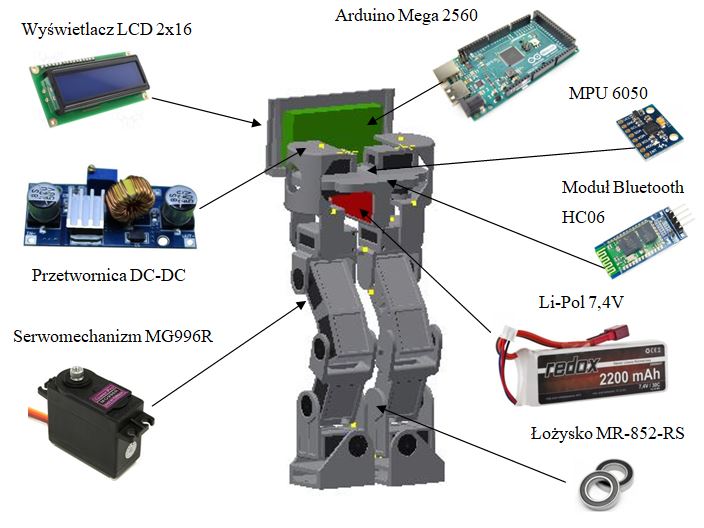
W pracy dyplomowej opisano konstrukcje robota kroczącego dwunożnego, generującego ruchy odpowiadające tym realizowanym przez człowieka. Robot jest w stanie wykonać przysiad, stać w pozycji wyprostowanej oraz generować chód. Wymuszenie odpowiedniego ruchu, odbywa się za pomocą aplikacji zaimplementowanej w smartfonie, komunikującej się z sterownikiem głównym robota za pomocą transmisji danych Bluetooth. Do stabilizacji w pozycji wyprostowanej wykorzystano moduł żyroskopu z akcelerometrem, dzięki któremu możliwy jest odczyt aktualnej pozycji .