Konstrukcja Linefollower’a
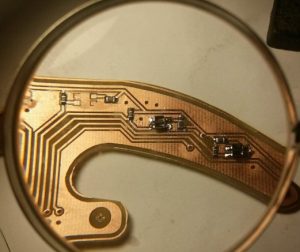
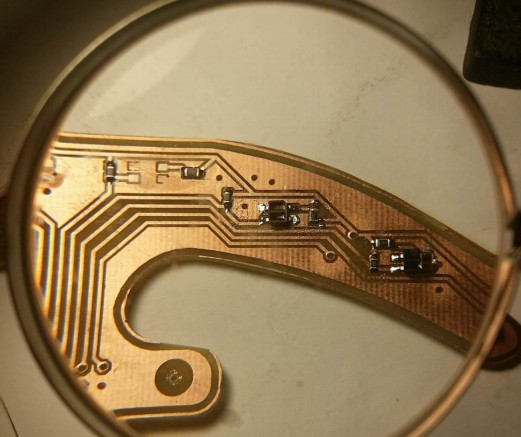
Celem projektu było opracowanie robota podążającego za linią. Na budowę
robota składają się dwie płytki PCB. Płytka stanowiąca podwozie oraz
listwa z czujnikami. Układ skonstruowany został w oparciu o mikrokontroler
ATMEGA 32. Rozpoznawanie linii zostało zrealizowane poprzez
zamontowanie czujników odbiciowych na przedniej listwie z czujnikami
robota. Stan każdego czujnika wyświetlany jest na diodzie LED. Czujniki
po odróżnieniu koloru czarnego od białego generują sygnał do przetwornika
ADC mikrokontrolera, gdzie podejmowana jest decyzja o regulacji obrotów
silnika poprzez PWM, wykorzystując do tego regulator PD. Sterowanie
kierunkiem działania silników odbywa się przy zastosowaniu mostka H.