
Badania nad opracowaniem robota humanoidalnego do obsługi klienta
Głównym celem projektu było opracowanie platformy jezdnej, interfejsu komunikacyjnego oraz koncepcji wizualnej robota humanoidalnego (Humanoida) wraz z wykonaniem prototypu robota
Read More
Opracowanie i walidacja automatycznego systemu do nadzorowania narzędzi do formowania blachy na zimno w stacjach obróbki plastycznej
Celem projektu jest opracowanie i walidacja automatycznego systemu do nadzorowania narzędzi do formowania blachy na zimno w stacjach obróbki plastycznej
Read More
Opracowanie rodziny foteli do komunikacji masowej ukierunkowanej na poprawę bezpieczeństwa pasażerów w transporcie publicznym
Celem projektu było opracowanie foteli do komunikacji masowej ukierunkowanej na poprawę bezpieczeństwa pasażerów w transporcie publicznym. We współpracy z firmą
Read More
Grant Rektorski – 33/32/SIGR/0005
Pracownicy Zakładu Urządzeń Mechatronicznych w składzie Dariusz Sędziak, Roman Regulski oraz Dominik Rybarczyk brali czynny udział w interdyscyplinarnym Grancie Rektorskim
Read More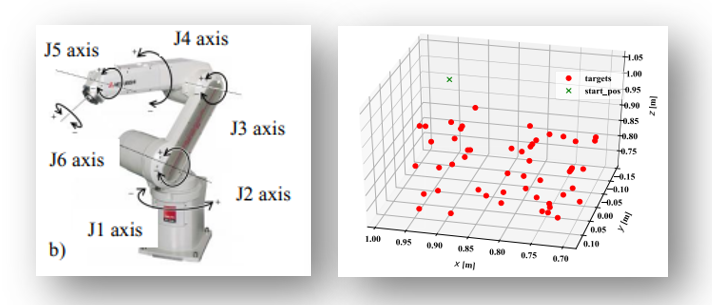
Artykuł Naukowy w International Journal of Control, Automation and Systems
Zespół naszych pracowników w składzie: Tymoteusz Lindner, prof. Andrzej Milecki oraz Daniel Wyrwał opublikował artykuł w prestiżowym czasopiśmie International Journal
Read MoreRobot Challenge 2018 – sukcesy KN Mechatron
Nadszedł czas podsumowania naszego wyjazdu do Pekinu na zawody Robot Challenge 2018. W tym roku wystawiliśmy jako koło naukowe 3
Read MoreSukcesy KN Mechatron w Pekinie
W sierpniu tego roku nasi studenci z KN Mechatron brali udział w zawodach Robot Chalange 2017 w składzie: Mariusz Pałubicki
Read More
Steca TriForce – All in One
Autorzy: Natan Stec, Eryk Stec – bracia, studenci oraz aktywni członkowie KN Mechatron – praca bierze udział w konkursie KOKOS
Read More
Konstrukcja pojazdu zdalnie sterowanego za pomocą smartfona
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Konstrukcja pojazdu zdalnie sterowanego za pomocą smartfona Sterowanie odbywa się poprzez sygnał odczytywany z akcelerometru
Read More